| 商品介绍 |
|
|







| 产品特色 | ||
| RBH7261是一款按绝对时间采样板卡,在采集的时间中包含了GPS获得的时间。这样能够保证两块RBH7261可以不受地域的限制使采集进行同步。RBH7261是一款双总线采集卡,同时有PCI和USB两种总线,使用十分方便 | ||
| 本卡非常适合需要远距离同步的场合,如电力系统等。 | ||
| 工作原理概述 | ||
 |
||
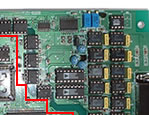
| 详细介绍 | 本采集卡分为模拟信号区和数字控制区两大部分 模拟信号采集部分 信号从左侧的DB37接入,通过保护与滤波电路进入16路采样保持器,在控制逻辑的作用下,再将信号送到多路开关,通过多路开关的选择将单路信号送到前置放大器,前置放大器将信号进行阻抗匹配,驱动A/D转换器,A/D转换的结果串行输出,送到高速光电转换器从而完成模拟部分的全部功能,将采集结果送入信号处理端,实现光电隔离的同步采集功能。前置放大器的控制、多路开关的控制、16路采样保存器的控制、A/D转换控制的控制器等都通过模拟部分的综合控制逻辑实现。本系统中,采用SPI技术实现数字部分对模拟部分的控制,仅仅使用非常少的光电耦合器就实现了模拟与数字的隔离,隔离电压最高可达3000V,因此,本板适合于工业现场应用,特别是电力系统领域的应用。 在模拟区,电源是通过数字区的+5伏电源通过DC-DC变换实现,用户不需要外接模拟电源,为现场应用提供了方便; 模拟部分的信号输入通过DB37接头输入,接触可靠,使用方便。 模拟信号的输入量程一般有两种,一种是+/-5伏,另一种是0-10伏模式,用户可以通过板上的跳线自由设置。有特殊需要的用户,本公司可以按照用户的要求进行配置,从而满足用户的要求。 数字控制部分 数字控制部分以DSP为中心,主要有以下6个部分: 1、CPU部分:本板采用MOTOROLA公司的高速DSP芯片DSP56F803,主频得到80MHz,具有快速的运算能力与各种丰富的资源,单片实现通讯、控制、程序存储与数据存储等功能。 2、PCI接口部分:通过双口RAM,连接PCI桥,实现PCI总线的高速采集功能 3、USB接口部分:通过USB桥,连接USB总线,实现USB总线的高速采集功能 4、A/D转换接口部分:与A/D转换的接口包括A/D转换的控制逻辑、A/D串行到并行转换逻辑,以及A/D转换结果读取的逻辑等。 5、与GPS模块的同步控制与通信部分:本系统采用MOTOROLA M12定时器模块,该模块具有高精度的定时功能,定时精度可以达到25纳秒。本系统正是通过该模块实现异地同步采集功能。与GPS定时模块的接口电路包括主电源部分;后备电源;电平转换;通讯接口;高速采集时钟;高速采集与GPS的同步锁相;与标准232接口逻辑等。 6、系统扩展部分:为了使本系统具有更广的应用,本系统设计了三种扩展接口,一个是并行总线扩展,相应输出由JP1接口;第二路是232接口,将GPS模块的串行口通过电平转换输出,便于通过PC对GPS模块进行调试;另一路是CAN总线接口,由J5接口。并行接口将DSP的16位输出总线引出,还有地址总线、控制总线等,便于本系统进行各种功能扩展,如通道扩展为32通道模拟量,32通道的数字量,模拟量输出扩展等。CAN总线输出扩展,便于一些现场的高定时采集要求。
本系统的工作过程: 1、 上电后,板上DSP进入准备采集状态,同时通过双口RAM监视PCI总线发送的命令、通过USB桥监视来自USB总线的命令,一旦接收到任何乙方的同步采集命令,就开始高速同步采集过程; 2、 无论是PCI总线的命令,还是USB总线的采集命令,都包括采样通道数及采样频率这两个参数,DSP接收到采样开始命令后,首先清除内部数据内容,启动同步采集逻辑,同步采集逻辑在GPS的PPS(PULSE PER SECOND)信号控制下产生与采样频率相同的采集脉冲,该采集脉冲序列的第一脉冲与PPS信号的上升延同步。同步采集脉冲经过驱动后,一方面通过光电耦合器控制采样保存芯片进入保持状态,另一方面该脉冲对DSP产生一个中断,让DSP进入中断采集模式,DSP进入该中断后,开始对16通道进行轮流采集,采集完成16通道后,DSP控制采样保持逻辑进入采集状态,外部信号有同时进入采样保存器。如此对每个采集脉冲进行处理,实现高速同步采集功能 。 3、 在DSP响应采集脉冲的中断过程中,同时还有一个串行口中断任务在执行,GPS模块每隔1秒回从串行口输出154个字节的串行数据,该数据送到DSP的串行口,DSP对该数据进行采集,并将该数据与实时采集的数据同步输出,从而实现采集的绝对定时。GPS输出的串行口数据包括当前的经度、纬度、年、月、日、时、分、秒、纳秒、可视卫星数、跟踪卫星数、温度等信息。 4、 由于数据采集过程与串行口通讯数据是异步的,当采集到数据,却没有通讯数据时,就填充无效数据0x1000,否则就填充串行口的有效数据;当串行口有数据,而采集数据没有时,就缓存通讯数据,在后续的采集数据时刻到,再依次输出。
驱动程序的数据输出通道数为模拟通道数+2,如要求10个模拟量通道数据采集,则应该设置通道数=12;如要求16个通道的模拟量采集,就设置通道数=18;第一个通道存放的是数据点顺序号,时间为10秒,每隔10秒时间,该计数器自动清零,然后逐步计数;第二个通道为通讯数据序列,当该数据为字节数据(0-255)时,表示为串行口数据序列,当该数据为0x1000(=4096)时,表示为无效的填充数据。 |
|

| 试验数据对比 | |||||||||||||||||||||||||||||
| 使用两块RBH7261,在两台不同的机器上安装,采集同一个信号,两台机器采集数据进行对比。采样频率每通道2k | |||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||
| 板卡编程方法 | |||||||||||||||||||||||||||||
| 本卡将 GPS 时间存放在第 2 个通道中,每秒中产生一次 GPS 信息,本卡也是每秒中和 GPS 同步一次。 | |||||||||||||||||||||||||||||
| GPS信息含义 | ||
共 153 个字节 1 、 @ 2 、 @ 3 、 H 4 、 a 5 、 gps_Month 6 、 gps_Day 7 、 gps_Year_h 8 、 gps_Year_l Year=h*256+l 9 、 gps_Hour 10 、 gps_Minute 11 、 gps_Second 12 、 gps_Nasecond3 13 、 gps_Nasecond2 14 、 gps_Nasecond1 15 、 gps_Nasecond0 gps_Nasecond=((n3 * 256 + n2) * 256 + n1) * 256+n0 16 、 gps_Latitude3 纬度 17 、 gps_Latitude2 18 、 gps_Latitude1 19 、 gps_Latitude0 gps_Latitude=((la3 * 256 + la2) * 256 + la1) * 256+la0 20 、 gps_Longitude3 21 、 gps_Longitude2 22 、 gps_Longitude1 23 、 gps_Longitude0 gps_Longitude=((lo3 * 256 + lo2) * 256 + lo1) * 256+lo0 24 、 gps_High3 25 、 gps_High2 26 、 gps_High1 27 、 gps_High0 28 、 gps_Msl3 29 、 gps_Msl2 30 、 gps_Msl1 31 、 gps_Msl0 32 、 gps_Latitude_unFilter 33 、 gps_Latitude_unFilter 34 、 gps_Latitude_unFilter 35 、 gps_Latitude_unFilter 36 、 gps_Longitude_unFilter 37 、 gps_Longitude_unFilter 38 、 gps_Longitude_unFilter 39 、 gps_Longitude_unFilter 40 、 gps_High_unFilter 41 、 gps_High_unFilter 42 、 gps_High_unFilter 43 、 gps_High_unFilter 44 、 gps_Msl_unFilter 45 、 gps_Msl_unFilter 46 、 gps_Msl_unFilter 47 、 gps_Msl_unFilter 48 、 gps_Speed_3D 49 、 gps_Speed_3D 50 、 gps_Speed_2D 51 、 gps_Speed_2D 52 、 gps_Heading_2D 53 、 gps_Heading_2D 54 、 gps_Dop 55 、 gps_Dop 56 、 gps_Satellite_visible 57 、 gps_Satellite_Tracked 154-24=130 130 、 gps_Receiver_Status 131 、 gps_Receiver_Status 天线状态 If (gps_Receiver_Status And 6) = 0 Then 天线 OK 140 、 d0 ' 符号 ,0 为正校准 ,FF 为负校准 141 、 gps_Temperature If d0 = 255 Then gps_Temperature = 0 - gps_Temperature 142 、 gps_UTC 143 、 d0 ' 符号 ' 格林威治时间校准参数 144 、 gps_Gmt_h 'HOUR 校准 145 、 gps_Gmt_m 'MINUTE 校准 146 、标识码 0 147 、标识码 1 148 、标识码 2 149 、标识码 3 150 、标识码 4 151 、标识码 5 152 、 D 153 、 A 参见例程 |
||